
Closerは単調で大変な作業をロボットによって⾃動化をすることが当たり前の世界を実現することを目指して設立されました。現在は食品メーカーなどの工場向けに特定の作業に特化した自律ロボットを提供すべく実証実験を重ねています。本記事ではロボットに興味を持った経緯や、自律的なロボットを用いて実現したい事業の将来像についてお話を伺いました。
樋口 翔太 (Shota Higuchi)
Closer 代表
この記事の目次
単調で大変な作業をロボットに。自動化が進んでいない分野にアプローチ 細かな試行錯誤と改善の積み重ねが「技術力」と「楽しさ」の源泉 エンドユーザーが本当に使いやすいものを。機能の絞り込みとインターフェース改善に注力単調で大変な作業をロボットに。自動化が進んでいない分野にアプローチ
― Closerの事業について教えてください。
樋口 「ロボットで人類をエンパワーメントし新たな価値を創造する」というミッションを掲げ、単調で大変な作業をロボットで自動化することで、多くの人が余暇を得ることや、より創造的な業務に取り組む機会を提供することを目指しています。
現在は食品・化粧品・薬品など、同種の製品を多く製造する工場向けに、特定の作業に特化した自律的なロボットを作っています。重工業や電気機器などと異なり、この分野はまだ手作業で生産していることが多く、特に少量多品種を製造するラインの自動化が進んでいない現状があります。同時に人手不足も深刻化しており、このような産業の自動化を行うことは社会的な使命だと考えています。
― Closer設立の経緯について教えてください。
樋口 高専生の時の飲食店のアルバイト経験と野菜自動収穫ロボットの研究が出発点です。まず飲食店でアルバイトを通じて、外食産業の中に単調でかつ肉体的に負荷が大きい作業が多いと感じました。ちょうどそのころ、高専では野菜の自動収穫ロボットについて研究していました。ロボット製作にあたっては農家の方にヒアリングをさせていただいたのですが、肉体的な負荷の大きい重労働であること、担い手がいない後継者不足の現状などをお伺いしました。自分の興味として自律ロボットをそれ以前から開発していたことに加え、このような経験を通じてまだ自動化が進んでおらず社会問題化している分野が多くある現実を目の当たりにし、自律的に稼働するロボットで解決できないかという問題意識を抱き、Closerを設立しました。
― Closerで製作しているロボットの特徴は何ですか?
樋口 エンドユーザーが使いやすいことと、自動化対象に対してコストパフォーマンスが適切であることを重視しています。
前提として、ロボット導入に関する市場調査を通じて、食品・化粧品・薬品などの工場における少量多品種の製造ラインでは、ロボット導入による費用対効果が不明確であることを課題として認識しました。工場でロボットを導入する際は、システムインテグレーター(SIer)を通じて、汎用的なロボットをカスタマイズして導入するケースが多いのですが、結果として食品・化粧品・薬品などの自動化には過剰な機能となりコストパフォーマンスが適切にならない場合があることや、導入までにたくさんの工数を踏むため、高コストかつ使い勝手や導入後の見通しが悪いという構造的な問題を抱えていました。
Closerでは輸送・包装・充填作業(ピックアンドプレース)の置き換えに特化した、キャスター付きの台の搭載するロボットアーム、ロボットハンド、画像処理システムを開発しており、これらの課題解決を目指しています。まずロボットの機能をピックアンドプレースに絞り込むことで役割を明確化し、限定された機能の中で、同一アルゴリズムで形状の異なる対象のピックアンドプレースを可能とするなどの汎用性の高さを実現します。結果としてエンドユーザーの操作のみでユースケースに合わせた設定を可能にし、エンドユーザー自身が現場で調整できることや可搬性の高さから、導入までの期間を短縮することを目指しています。これは結果として、機能の絞り込みにより従来のロボットに比べハード面のコストパフォーマンスが適切になるとともに、ソフト面でも導入時の専門的なカスタマイズが不要になり、価格も安価に提供できるというポイントに直結しています。
細かな試行錯誤と改善の積み重ねが「技術力」と「楽しさ」の源泉

― ロボット開発に興味を持ったきっかけは何ですか?
樋口 物心ついたころから工作が好きで、家にある空き箱や紙などで作ったもので遊んでいました。工作といっても、作ったものを飾ったり鑑賞したりするのではなく、動かして遊ぶのが好きでした。例えば「ピタゴラスイッチ」のようなビー玉を転がして遊ぶようなものや、輪ゴムを使って羽根つきの棒を高く飛ばすようなものを作って遊んでいました。その後、小学校4年頃に電子工作をはじめ、5年生のときに「ロボカップ」という自律移動型ロボットによる競技会に出会って、プログラミングも行うようになりました。以降は機械・回路・ソフトウェアを、すべて扱うようになりました。長岡工業高等専門学校(長岡高専)に進学したのも、ロボカップで世界大会に出場するという目標があったからです。
― 「ロボカップ」に興味を持ったポイントは何でしょうか?
樋口 自律的なロボットを扱っているということだと思います。機械や回路などハードウェアの性能もさることながら、ソフトウェアの巧拙も勝敗を大きく左右します。何より、自分が書いたプログラムでロボットが動いてくれた時に「面白い!」と感じることができました。もちろんコントローラー等で操作するロボットにも興味はあり、いわゆる「高専ロボコン」へ出場していた時もありましたが、人が動かすのではなく、センサー等の情報を取得してロボット自身が判断して動くところが、特に面白いと感じていました。
― ロボットを自律的に動作させるときに難しいポイントや面白さなどありますか?
樋口 限られた環境下、限られたセンサーの情報を用いて、ロボット自身にどう判断させるかに知恵を絞っていました。ロボットを自律的に動作させるのは試行錯誤の繰り返しで、小さな失敗と改善という作業の積み重ね自体が楽しいと感じています。特にロボカップでは「お金をかけずにどう性能向上させるか」というソフトウェアの試行錯誤に競技性を見いだせる点も合っていたのではないかと思います。またロボカップ競技後には情報交換会があり、他のチームでこんなセンサーを使っているとか、こんな処理をしているとか、技術的な話を聞いているととてもワクワクして、それも楽しいイベントでした。
様々な技術要素の組み合わせでなるロボットですが、様々な開発を重ねるごとに適切な構成を考えることや開発を素早く回すことができるようになってきたと感じます。この試行錯誤の繰り返しにより、ロボット製作の経験値とビジネス的な知識を組み合わせることで、顧客が本当に求めているロボットサービスの実現を目指します。
エンドユーザーが本当に使いやすいものを。機能の絞り込みとインターフェース改善に注力

― 自律ロボットにできること、出来ないことは何でしょうか?ロボットを社会実装し普及させていくために必要なことは何だと考えていますか?
樋口 人間も同じですが、あらゆる状況に対処する、というのはやはり難しいと思います。対処する状況が複雑化するほど、センサー類を多く搭載し、かつセンサーで得た情報を適切に処理する高度なソフトウェアも必要になり高コスト化します。またロボットでは特に動きの制限が大きく、あらゆる方向に曲げられるロボットアーム・関節はないので、ハード面や稼働させるスペースの広さも大きな制約要因となります。複数の役割を担わせ、汎用的にする分だけハード・ソフト両面の導入コストが上がり、動きも複雑になるので「操作しにくい・分かりにくい」ロボットになってしまいます。そのため、Closerの自律ロボットはピックアンドプレースの置き換えに特化し、自律ロボットに適した領域で、エンドユーザーが本当に使いやすい機能に絞り込んだロボットの提供を目指しています。
実はこの点は、社会実装する上で必要だと考えていることにも繋がります。コスト面を除けば、ロボットが一般に普及する上での一番のハードルは、エンドユーザーとメーカーの間にある知識的な乖離だと考えています。
この時に必要なのは、エンドユーザーを教育してスキルアップさせるアプローチではなく、ユーザーインターフェースを最適化して、最小限の知識で誰もが使えるようになることだと思います。例えば一般的なロボットは稼働させるためにロボットティーチング(産業用ロボットのプログラムを作成することで、座標や動作角などをインプットする)を行いますが、これは設置する技術者に必要なもので、エンドユーザーに求めるべき機能ではありません。同様に、身近な例で言えば、スマートフォンは動作している通信プロトコルやソフトウェアなどについて、技術的な原理を知る必要はないですし、専門的な調整も必要ありません。このようにエンドユーザーが簡単かつ適切に使用・調整することができるロボットであれば、身近で生活を豊かにしてくれる存在として普及していくのではないかと思いますし、Closerのロボットもそうあるべきだと考えて設計しています。
― エンドユーザーに合わせて機能を絞り込んでいくというのは、簡単そうに思えて、なかなか難しい作業ですね。
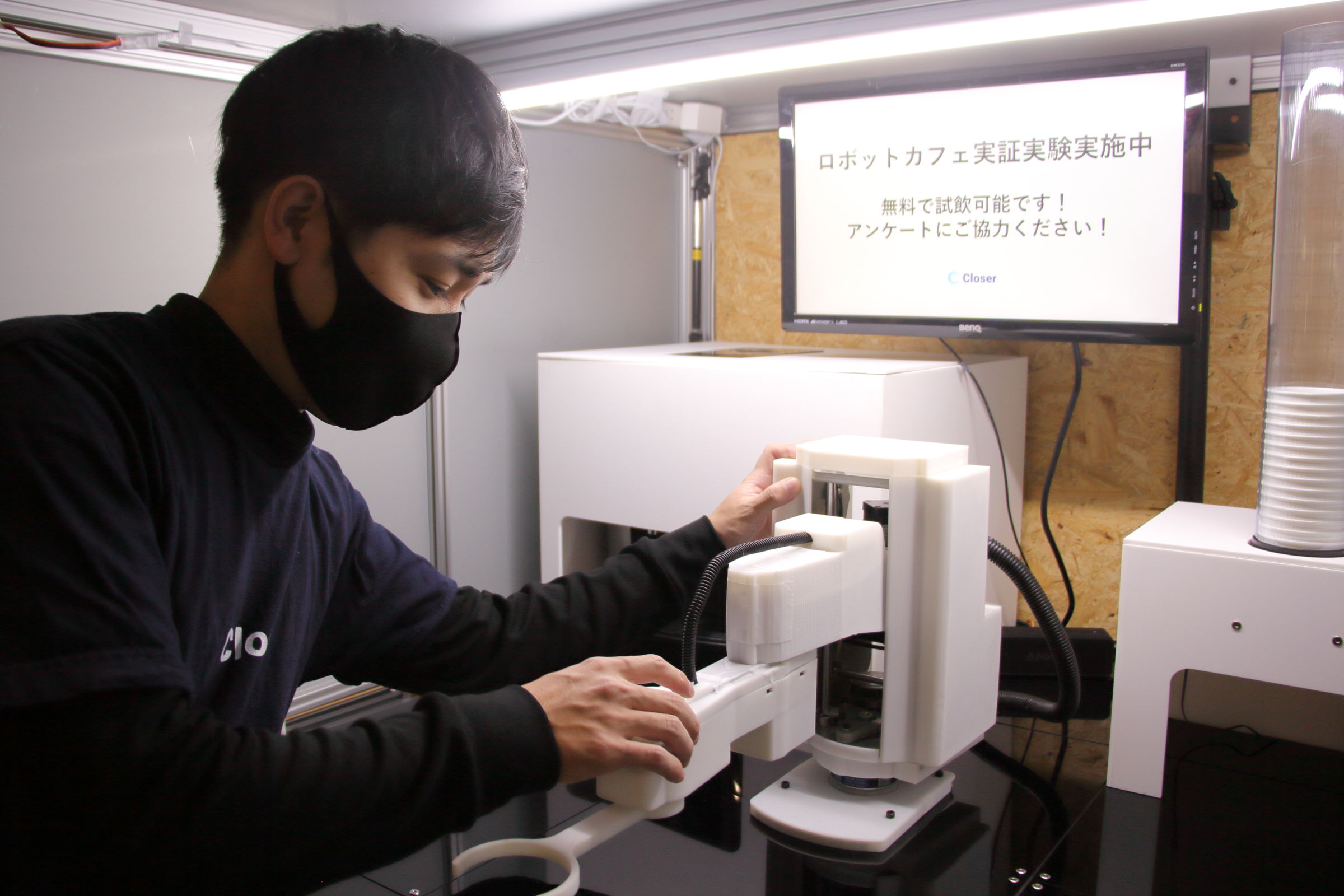
樋口 例えば現在、つくば市の「つくばSociety5.0社会実装トライアル支援事業」の採択案件として、ロボットアームによるドリンク自動提供の実証実験を行っています。ここでは、コーヒーを注文するとアームが動き、紙コップにコーヒーをいれて、差し出す、という形で、機能を絞り込んでいます。そこで実際に使ってもらえば、機能の過不足も分かりますし、ユーザーの生の声を聴くことができます。そのように試験的に社会実装できる場所は非常に重要だと考えています。今後もつくば市と協働したプロジェクトが予定されているので、実際に動かし、使ってもらうことを通じて試行錯誤していきたいと考えています。
― ロボットを扱う可能性のある人に対して、メッセージはありますか?
樋口 ロボットはあくまで手段であって、単調で大変な作業を代替することで創造的な時間や余暇を生み出すことが目的です。自律ロボットは「分かりにくい」とか「人の仕事を奪うのでは」といった心理的障壁が大きい特性があるので、もっと身近な存在として捉えてほしいと考えています。現在のロボットはエンドユーザーに最適化されていないので分かりにくいのは当然で、まずその点を我々は解決していかなければならないと思います。エンドユーザーと向き合い、現場で求められていることの中から自律ロボットで効率化するのに適した分野を選び出し、実装していく。最も重要なのは、単に技術を開発するのではなく、技術を社会で求められている形に整えて提供することだと思います。簡単に答えが見つかる領域ではありませんが、自動化や効率化を推し進めることができれば、過去に生み出されてきたたくさんの発明や製品と同じように、たくさんの人の生活を豊かにすることができると考えています。ぜひ多くの方に自律ロボットを通じて新しい価値を創る活動に力を貸していただきたいです。
― 自律ロボットの可能性を追いかける真摯な姿勢が伝わってきました。興味深いお話、ありがとうございました。

